
Arduino实验-1
前言
参考文章
RFID 与 Arduino | 如何将 RC522 RFID 模块与 Arduino 结合使用
vscode配置环境
此插件适用于旧版IDE版本:支持的旧版 Arduino IDE 版本为
1.6.x及以上(但不包括)2.0.0,不支持Arduino IDE2.X.Y,并且将来没有支持计划
- vscode搜索插件
Arduino - 按住
ctrl+,进入设置界面,进入setting.json文件
Arduino.path那里设置为自己的安装路径即可,其他的直接复制下面即可
"arduino.path": "D:\\arduino_ide\\Arduino",
"C_Cpp.intelliSenseEngine": "Tag Parser",
"editor.insertSpaces": true,
"files.autoGuessEncoding": true,
"arduino.logLevel": "info",
"explorer.confirmDelete": false,
"editor.detectIndentation": false.vscode文件夹里在Arduino.json添加最后一行,其他的默认不需要跟我下面一样:
{
"board": "arduino:avr:uno",
"sketch": "test1.ino",
"port": "COM27",
"output": "./Arduino/build"
}- 在屏幕的右下角可以选择串口和开发板的型号

- 编译与上传
在左上角

板子
型号: Arduino Uno
【供电】
直流电源插孔:可以使用电源插孔为Arduino开发板供电。电源插孔通常连接到一个适配器。开发板的供电范围可以是5-20V,但制造商建议将其保持在
7-12V之间。高于12V时,稳压芯片可能会过热,低于7V可能会供电不足VIN引脚:该引脚用于使用外部电源为Arduino Uno开发板供电。电压应控制在上述提到的范围内
USB电缆:连接到计算机时,提供500mA/5V电压
在Arduino上,ADC具有
10位分辨率,这意味着它可以通过1,024个数字电平表示模拟电压
- 数字引脚
每个引脚可提供/接收最高40 mA的电流。但推荐的电流是20毫安
所有引脚提供的绝对最大电流为200mA
● 低于0.8v - 视为0
● 高于2.0v - 视为1
板子有两个外部中断:INT0和INT1
Aref:模拟输入的参考电压
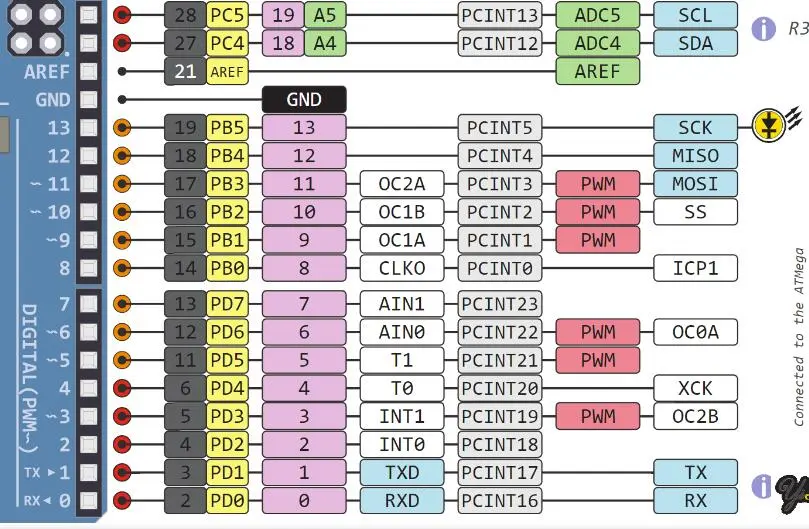
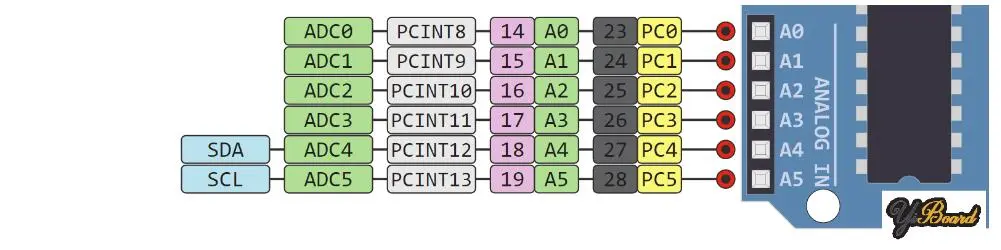
- 模拟引脚
有6个模拟引脚,它们作为ADC
- 其他
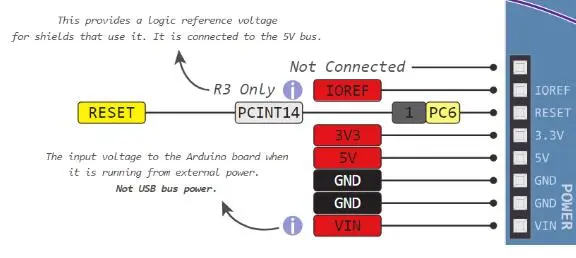
IOREF:该引脚是输入/输出参考。它提供了微控制器工作的参考电压
RESET: 复位Arduino开发板
模块
RFID
Arduino库:https://github.com/omersiar/RFID522-Door-Unlock
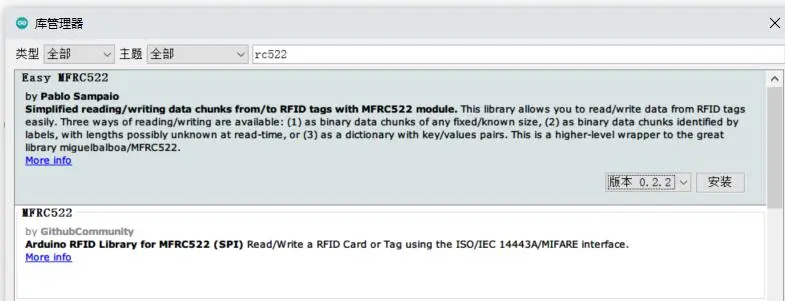
也可以在IDE里面进行安装库:点击「项目」—「加载库」—「管理库」,查找选择「MFC522」最新版本进行安装
MFRC522芯片
附带的白卡和钥匙扣是S50卡,每张卡都有自己的标识(UID)
- 接线
| RFID模块 | Arduino板 |
|---|---|
| SDA【在SPI接口中为NSS(从机标志管脚)】 | 10 |
| SCK | 13 |
| MOSI【MCU输出,RC522接收】 | 11 |
| MISO【RC522输出,MCU接收】 | 12 |
| IRQ【中断请求输出】 | / |
| GND | GND |
| RST | 9 |
| 3.3V | 3.3V |
舵机
- 安装库
在 Mega 以外的板上,使用该库会禁用analogWrite() 引脚 9 和 10 上的 (PWM) 功能
- 接线
| 舵机 | Arduino板 |
|---|---|
| 红色 | 5V |
| 黑色/棕色 | GND |
| 黄色、橙色或白色 | PWM信号线 |
定时器
板子有三个定时器
timer0:一个被Arduino的delay(), millis()和micros()使用的8位定时器
timer1:一个被Arduino的Servo()库使用的16位定时器
timer2:一个被Arduino的Tone()库使用的8位定时器
整合代码
test1.ino
#include <MFRC522.h>
#include <Servo.h>
/*========================引脚宏定义========================*/
// 从机片选引脚
#define RFID_SDA_PIN 10
// RFID复位引脚
#define RFID_RST_PIN 9
// LED1引脚(绿)
#define LED1_PIN 2
// LED2引脚(红)
#define LED2_PIN 3
// LED3引脚(蓝)
#define LED3_PIN 4
// 舵机引脚
#define Servo_PIN 5
// 蜂鸣器引脚
#define Buzzer_PIN 6
/*========================其他宏定义========================*/
#define RFID_MAX_ID 2 // 最大ID用户数量
#define USE_RFID_Debug 1 // RFID使用串口打印调试功能
/*========================全局变量========================*/
/*RFID相关*/
MFRC522 rfid(RFID_SDA_PIN, RFID_RST_PIN); // 实例化
MFRC522::MIFARE_Key key;
typedef struct
{
bool isRFID_ID_Flag; // RFID符合标志位
byte ID_PICC_Arr[RFID_MAX_ID][4]; // 存储已知的RFID卡秘钥
} bsp_RFID_st;
bsp_RFID_st bsp_RFID =
{
.isRFID_ID_Flag = false,
.ID_PICC_Arr = {
{0x86, 0x01, 0x6C, 0x1F},
{0xCA, 0x0D, 0x55, 0xD3},
},
};
/*LED相关*/
typedef enum
{
LED_ON = 0,
LED_OFF = 1
} LED_Status_et;
/*Servo相关*/
Servo my_servo; // 创建一个舵机对象
typedef struct
{
bool Servo_Start_Count_Flag; // 舵机转动完成标志位
} bsp_Servo_st;
bsp_Servo_st bsp_Servo =
{
.Servo_Start_Count_Flag = false,
};
/*Buzzer相关*/
typedef enum
{
BUZZER_ON = 0,
BUZZER_OFF = 1
} Buzzer_Status_et;
typedef struct
{
bool Buzzer_Ring_Flag; // 蜂鸣器响一段时间标志位
} bsp_Buzzer_st;
bsp_Buzzer_st bsp_Buzzer =
{
.Buzzer_Ring_Flag = false,
};
/*========================函数声明========================*/
static void BSP_RFID_Init(void); // RFID初始化
static void BSP_RFID_Check(void); // RFID检测
static void printHex(byte *buffer, byte bufferSize); // 打印十六进制
static void printDec(byte *buffer, byte bufferSize); // 打印十进制
static void BSP_RFID_Handler(void); // RFID处理函数
static void LED_Init(void); // LED初始化
static void LED_Control(uint8_t led_pin, LED_Status_et led_status); // LED控制亮灭
static void LED_Flip(uint8_t led_pin); // 控制LED翻转
static void UART_Init(void); // 串口初始化
static void Servo_Init(void); // 舵机初始化
static void Servo_Conntrol_Angle(uint8_t angle); // 控制舵机转动角度
static void Timer2_Init(void); // 定时器2初始化
static void Buzzer_Init(void); // 蜂鸣器初始化
static void Buzzer_Control(Buzzer_Status_et buzzer_status); // 控制蜂鸣器
static void Buzzer_Ring(void); // 控制蜂鸣器响一段时间
void setup()
{
UART_Init(); // 串口初始化
LED_Init(); // LED初始化
Buzzer_Init(); // 蜂鸣器初始化
Servo_Init(); // 舵机初始化
Timer2_Init(); // 定时器2初始化
BSP_RFID_Init(); // RFID初始化
}
void loop()
{
BSP_RFID_Check(); // RFID检测
}
/*==============================BUZZER==============================*/
static void Buzzer_Init(void)
{
pinMode(Buzzer_PIN, OUTPUT); // 输出模式
Buzzer_Control(BUZZER_OFF); // 默认关闭
}
// 控制蜂鸣器
static void Buzzer_Control(Buzzer_Status_et buzzer_status)
{
if (BUZZER_ON == buzzer_status)
{
digitalWrite(Buzzer_PIN, LOW);
}
else
{
digitalWrite(Buzzer_PIN, HIGH);
}
}
// 控制蜂鸣器响一段时间
static void Buzzer_Ring(void)
{
Buzzer_Control(BUZZER_ON);
bsp_Buzzer.Buzzer_Ring_Flag = true;
}
/*==============================Servo==============================*/
// 舵机初始化
static void Servo_Init(void)
{
my_servo.attach(Servo_PIN); // 初始化舵机引脚
Servo_Conntrol_Angle(0); // 控制舵机角度(默认复位0°)
}
// 控制舵机转动角度
static void Servo_Conntrol_Angle(uint8_t angle)
{
my_servo.write(angle);
}
/*==============================LED==============================*/
// LED初始化
static void LED_Init(void)
{
pinMode(LED1_PIN, OUTPUT); // 输出模式
pinMode(LED2_PIN, OUTPUT); // 输出模式
pinMode(LED3_PIN, OUTPUT); // 输出模式
// 默认全灭
LED_Control(LED1_PIN, LED_OFF);
LED_Control(LED2_PIN, LED_OFF);
LED_Control(LED3_PIN, LED_OFF);
}
// LED控制
static void LED_Control(uint8_t led_pin, LED_Status_et led_status)
{
if (LED_ON == led_status)
{
digitalWrite(led_pin, LOW);
}
else
{
digitalWrite(led_pin, HIGH);
}
}
// 控制LED翻转
static void LED_Flip(uint8_t led_pin)
{
static uint8_t flag = false;
if (flag)
{
LED_Control(led_pin, LED_ON);
}
else
{
LED_Control(led_pin, LED_OFF);
}
flag = !flag;
}
/*==============================RFID==============================*/
// 将字节数组作为十六进制值输出打印
static void printHex(byte *buffer, byte bufferSize)
{
for (byte i = 0; i < bufferSize; i++)
{
Serial.print(buffer[i] < 0x10 ? " 0" : " "); // 比较当前字节的值是否小于16(0x10的十六进制值为16)小于则前面补0大于则不需要直接补空格
Serial.print(buffer[i], HEX);
}
}
// 将字节数组作为十进制值输出打印
static void printDec(byte *buffer, byte bufferSize)
{
for (byte i = 0; i < bufferSize; i++)
{
Serial.print(buffer[i] < 0x10 ? " 0" : " ");
Serial.print(buffer[i], DEC);
}
}
// RFID初始化
static void BSP_RFID_Init(void)
{
SPI.begin(); // SPI初始化
rfid.PCD_Init(); // MFRC522初始化
}
// 检测RFID
static void BSP_RFID_Check(void)
{
// 判断上一个处理完没
if (bsp_RFID.isRFID_ID_Flag)
{
return;
}
// 检测是否有新卡(返回true,表示检测到新卡 | 返回false,表示未检测到新卡)
if (!rfid.PICC_IsNewCardPresent()) // 没有新卡则直接退出
{
return;
}
// 读取卡片的 UID(需要先调用【PICC_IsNewCardPresent】检测是否有新卡 读取成功返回1 失败返回0)
if (!rfid.PICC_ReadCardSerial())
{
return;
}
MFRC522::PICC_Type piccType = rfid.PICC_GetType(rfid.uid.sak); // 获取卡类型
#if USE_RFID_Debug
Serial.print(F("PICC type: "));
Serial.println(rfid.PICC_GetTypeName(piccType)); // 打印卡类型
#endif
// 检查卡是不是经典类型,不是则强制退出
if ((piccType != MFRC522::PICC_TYPE_MIFARE_MINI) &&
(piccType != MFRC522::PICC_TYPE_MIFARE_1K) &&
(piccType != MFRC522::PICC_TYPE_MIFARE_4K))
{
#if USE_RFID_Debug
Serial.println(F("Your tag is not of type MIFARE Classic.")); // 打印错误提示
#endif
return;
}
#if USE_RFID_Debug
// 打印卡ID
Serial.println(F("The NUID tag is:"));
Serial.print(F("In hex: "));
printHex(rfid.uid.uidByte, rfid.uid.size); // 打印十六进制
Serial.println(); // 换行
Serial.print(F("In dec: "));
printDec(rfid.uid.uidByte, rfid.uid.size); // 打印十进制
Serial.println();
#endif
// 判断卡ID是否符合
for (byte i = 0; i < RFID_MAX_ID; i++)
{
if (rfid.uid.uidByte[0] == bsp_RFID.ID_PICC_Arr[i][0])
{
if (rfid.uid.uidByte[1] == bsp_RFID.ID_PICC_Arr[i][1])
{
if (rfid.uid.uidByte[2] == bsp_RFID.ID_PICC_Arr[i][2])
{
if (rfid.uid.uidByte[3] == bsp_RFID.ID_PICC_Arr[i][3])
{
bsp_RFID.isRFID_ID_Flag = true; // 标志位置1
BSP_RFID_Handler();
}
}
}
}
}
rfid.PICC_HaltA(); // 将卡片进入休眠状态
rfid.PCD_StopCrypto1(); // 停止 Crypto1 加密协议
}
// RFID处理函数
static void BSP_RFID_Handler(void)
{
if (bsp_RFID.isRFID_ID_Flag)
{
LED_Control(LED1_PIN, LED_ON);
LED_Control(LED2_PIN, LED_OFF);
Buzzer_Ring();
Servo_Conntrol_Angle(180);
bsp_Servo.Servo_Start_Count_Flag = true; // 开始计数
#if USE_RFID_Debug
Serial.print(F("PASS"));
#endif
}
}
/*==============================OTHER==============================*/
// 串口初始化
static void UART_Init(void)
{
Serial.begin(9600); // 波特率9600
}
// 定时器2初始化
static void Timer2_Init(void)
{
// (15 + 1) * 64μs = 1ms
TCCR2A = 0;
TCCR2B = 0;
TCNT2 = 0;
OCR2A = 15;
TCCR2A |= (1 << WGM21);
TCCR2B |= (1 << CS22) | (1 << CS21) | (1 << CS20);
TIMSK2 |= (1 << OCIE2A);
// 启用中断
sei();
}
// 定时器2中断函数
ISR(TIMER2_COMPA_vect)
{
static uint8_t sys_led_Cnt = 0;
static uint16_t Servo_Cnt = 0;
static uint16_t Buzzer_Cnt = 0;
sys_led_Cnt++;
// 判断是否达到阈值
if (sys_led_Cnt >= 200) // 系统运行灯
{
sys_led_Cnt = 0;
LED_Flip(LED3_PIN);
}
if (bsp_Servo.Servo_Start_Count_Flag)
{
Servo_Cnt++;
if (Servo_Cnt >= 2000) // 2s
{
Servo_Cnt = 0;
LED_Control(LED1_PIN, LED_OFF);
LED_Control(LED2_PIN, LED_ON);
Servo_Conntrol_Angle(0);
bsp_Servo.Servo_Start_Count_Flag = false;
bsp_RFID.isRFID_ID_Flag = false;
}
}
if (bsp_Buzzer.Buzzer_Ring_Flag) // 蜂鸣器响一段时间计数
{
Buzzer_Cnt++;
if (Buzzer_Cnt >= 100)
{
Buzzer_Cnt = 0;
bsp_Buzzer.Buzzer_Ring_Flag = false;
Buzzer_Control(BUZZER_OFF); // 关闭蜂鸣器
}
}
}串口
板子只有一个硬件串口,但是不够的话可以使用软串口,只需要两个数字IO口代替TX和RX
常用的软串口库:
SoftwareSerial库、AltSoftSerial库、NewSoftSerial库
实验2整合代码
test2.ino
#include <SoftwareSerial.h>
/*========================引脚宏定义========================*/
// LED1引脚(绿)
#define LED1_PIN 2
// 蜂鸣器引脚
#define Buzzer_PIN 6
// 软件串口引脚-TX
#define SOFT_UART_TX_PIN 9
// 软件串口引脚-RX
#define SOFT_UART_RX_PIN 8
// 继电器1
#define Relay1_PIN 3
// 继电器2
#define Relay2_PIN 4
/*========================其他宏定义========================*/
/*========================全局变量========================*/
/*LED相关*/
typedef enum
{
LED_ON = 0,
LED_OFF = 1
} LED_Status_et;
/*Buzzer相关*/
typedef enum
{
BUZZER_ON = 0,
BUZZER_OFF = 1
} Buzzer_Status_et;
typedef struct
{
bool Buzzer_Ring_Flag; // 蜂鸣器响一段时间标志位
} bsp_Buzzer_st;
bsp_Buzzer_st bsp_Buzzer =
{
.Buzzer_Ring_Flag = false,
};
/*WiFi模块相关*/
SoftwareSerial wifi_uart(SOFT_UART_RX_PIN, SOFT_UART_TX_PIN); // 创建一个对象(RX, TX)
typedef struct
{
String wifi_rx_data; // WiFi接收缓存字符串
} bsp_wifi_st;
bsp_wifi_st bsp_wifi =
{
.wifi_rx_data = "",
};
/*RELAY相关*/
typedef enum
{
RELAY_ON = 0,
RELAY_OFF = 1
} Relay_Status_et;
/*========================函数声明========================*/
static void LED_Init(void); // LED初始化
static void LED_Control(uint8_t led_pin, LED_Status_et led_status); // LED控制亮灭
static void LED_Flip(uint8_t led_pin); // 控制LED翻转
static void UART_Init(void); // 串口初始化
// static void UART_Rx_Handler(void); // 串口接收处理函数
static void Timer2_Init(void); // 定时器2初始化
static void Buzzer_Init(void); // 蜂鸣器初始化
static void Buzzer_Control(Buzzer_Status_et buzzer_status); // 控制蜂鸣器
static void Buzzer_Ring(void); // 控制蜂鸣器响一段时间
static void WiFi_Init(void); // WiFi初始化
static void WiFi_Get_Data(void); // WiFi模块获取数据
static void WiFi_Rx_Handler(void); // WiFi接收处理
static void Relay_Init(void); // 继电器初始化
static void Relay_Control(uint8_t relay_pin, Relay_Status_et status); // 控制继电器
void setup()
{
UART_Init(); // 串口初始化
LED_Init(); // LED初始化
Buzzer_Init(); // 蜂鸣器初始化
Relay_Init(); // 继电器初始化
Timer2_Init(); // 定时器2初始化
WiFi_Init(); // WiFi初始化
}
void loop()
{
WiFi_Get_Data(); // 获取数据
// UART_Rx_Handler(); // 串口接收处理
WiFi_Rx_Handler(); // 处理数据
}
/*==============================RELAY==============================*/
// 继电器初始化
static void Relay_Init(void)
{
pinMode(Relay1_PIN, OUTPUT); // 输出模式
pinMode(Relay2_PIN, OUTPUT); // 输出模式
Relay_Control(Relay1_PIN, RELAY_OFF);
Relay_Control(Relay2_PIN, RELAY_OFF);
}
// 控制继电器
static void Relay_Control(uint8_t relay_pin, Relay_Status_et status)
{
if (RELAY_ON == status)
{
digitalWrite(relay_pin, HIGH);
}
else
{
digitalWrite(relay_pin, LOW);
}
}
/*==============================BUZZER==============================*/
static void Buzzer_Init(void)
{
pinMode(Buzzer_PIN, OUTPUT); // 输出模式
Buzzer_Control(BUZZER_OFF); // 默认关闭
}
// 控制蜂鸣器
static void Buzzer_Control(Buzzer_Status_et buzzer_status)
{
if (BUZZER_ON == buzzer_status)
{
digitalWrite(Buzzer_PIN, LOW);
}
else
{
digitalWrite(Buzzer_PIN, HIGH);
}
}
// 控制蜂鸣器响一段时间
static void Buzzer_Ring(void)
{
Buzzer_Control(BUZZER_ON);
bsp_Buzzer.Buzzer_Ring_Flag = true;
}
/*==============================LED==============================*/
// LED初始化
static void LED_Init(void)
{
pinMode(LED1_PIN, OUTPUT); // 输出模式
// 默认全灭
LED_Control(LED1_PIN, LED_OFF);
}
// LED控制
static void LED_Control(uint8_t led_pin, LED_Status_et led_status)
{
if (LED_ON == led_status)
{
digitalWrite(led_pin, LOW);
}
else
{
digitalWrite(led_pin, HIGH);
}
}
// 控制LED翻转
static void LED_Flip(uint8_t led_pin)
{
static uint8_t flag = false;
if (flag)
{
LED_Control(led_pin, LED_ON);
}
else
{
LED_Control(led_pin, LED_OFF);
}
flag = !flag;
}
/*==============================WiFi==============================*/
// WiFi模块初始化
static void WiFi_Init(void)
{
wifi_uart.begin(115200); // 波特率
wifi_uart.println("AT+CWMODE=2\r\n"); // 模式2
delay(1000);
wifi_uart.println("AT+RST\r\n"); // 复位
delay(5000);
delay(2000);
wifi_uart.println("AT+CWSAP=\"ESP8266\",\"12345678\",11,0\r\n"); // 设置wifi
delay(1000);
wifi_uart.println("AT+CIPMUX=1\r\n"); // 多连接
delay(1000);
wifi_uart.println("AT+CIPSERVER=1,8899\r\n"); // 设置端口号
delay(1000);
Serial.println("system init OK");
}
// 获取wifi数据
static void WiFi_Get_Data(void)
{
while (wifi_uart.available() > 0)
{
bsp_wifi.wifi_rx_data += char(wifi_uart.read()); // 读取数据
delay(4);
}
}
// wifi接收处理函数
static void WiFi_Rx_Handler(void)
{
if (bsp_wifi.wifi_rx_data != "")
{
Serial.println(bsp_wifi.wifi_rx_data); // 打印数据
Serial.println("\r\n");
if (('+' == bsp_wifi.wifi_rx_data[2]) && ('I' == bsp_wifi.wifi_rx_data[3]) && ('P' == bsp_wifi.wifi_rx_data[4])) // MCU接收到的数据为+IPD
{
if (('D' == bsp_wifi.wifi_rx_data[5]) && (',' == bsp_wifi.wifi_rx_data[8]))
{
// 数据解析
if ('0' == bsp_wifi.wifi_rx_data[11])
{
Relay_Control(Relay1_PIN, RELAY_ON);
Buzzer_Ring();
Serial.println("Open Relay1\r\n");
}
if ('1' == bsp_wifi.wifi_rx_data[11])
{
Relay_Control(Relay1_PIN, RELAY_OFF);
Serial.println("Close Relay1\r\n");
}
if ('2' == bsp_wifi.wifi_rx_data[11])
{
Relay_Control(Relay2_PIN, RELAY_ON);
Buzzer_Ring();
Serial.println("Open Relay2\r\n");
}
if ('3' == bsp_wifi.wifi_rx_data[11])
{
Relay_Control(Relay2_PIN, RELAY_OFF);
Serial.println("Close Relay2\r\n");
}
}
}
}
bsp_wifi.wifi_rx_data = String("");
}
/*==============================OTHER==============================*/
// 串口初始化
static void UART_Init(void)
{
Serial.begin(9600); // 波特率9600
}
// 串口接收
// static void UART_Rx_Handler(void)
// {
// if (Serial.available())
// {
// String order = "";
// while (Serial.available())
// {
// char chr = (char)Serial.read();
// order += chr;
// delay(2);
// }
// order.trim();
// wifi_uart.println(order);
// }
// }
// 定时器2初始化
static void Timer2_Init(void)
{
// (15 + 1) * 64μs = 1ms
TCCR2A = 0;
TCCR2B = 0;
TCNT2 = 0;
OCR2A = 15;
TCCR2A |= (1 << WGM21);
TCCR2B |= (1 << CS22) | (1 << CS21) | (1 << CS20);
TIMSK2 |= (1 << OCIE2A);
// 启用中断
sei();
}
// 定时器2中断函数
ISR(TIMER2_COMPA_vect)
{
static uint8_t sys_led_Cnt = 0;
static uint16_t Servo_Cnt = 0;
static uint16_t Buzzer_Cnt = 0;
sys_led_Cnt++;
// 判断是否达到阈值
if (sys_led_Cnt >= 200) // 系统运行灯
{
sys_led_Cnt = 0;
LED_Flip(LED1_PIN);
}
if (bsp_Buzzer.Buzzer_Ring_Flag) // 蜂鸣器响一段时间计数
{
Buzzer_Cnt++;
if (Buzzer_Cnt >= 100)
{
Buzzer_Cnt = 0;
bsp_Buzzer.Buzzer_Ring_Flag = false;
Buzzer_Control(BUZZER_OFF); // 关闭蜂鸣器
}
}
}
问题
编译出现对应多个库时,会优先选择电脑的而不是你工程的库文件夹里的,解决方法是可以重新命名或者使用全路径头文件,或者把本地的那个库文件夹压缩成压缩包再把库文件删除即可