
通信协议学习-SPI
前言
参考文章/博主
SPI
参考:
理解SPI/Dual SPI/Quad SPI/QPI之间的区别
SPI详解
SPI是一个同步,全双工,高速的通信总线,SPI接口主要应用在EEPROM,FLASH,实时时钟,AD转换器, 还有数字信号处理器和数字信号解码器之间
SPI分类
- 标准SPI
- Dual SPI(双线串行外设接口)
单向数据传输速度上是标准SPI的双倍,一般情况下用于半双工通信
- Quad SPI(四线SPI,即数据线最多可以使用4根)
一般情况下用于半双工通信
SPI特点
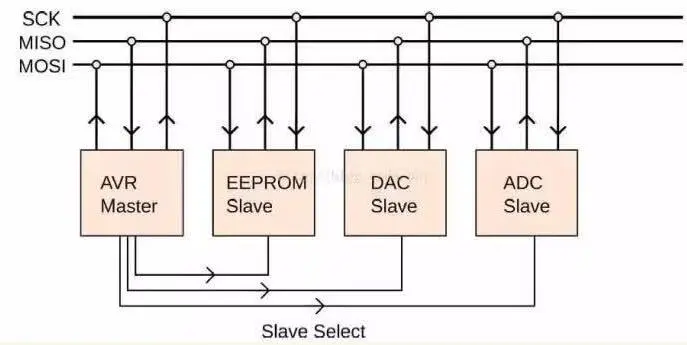
- 采用主-从(Master-Slave)的控制方式
规定了在SPI通信中,有一个
主设备(通常是微控制器或主板)来控制一个或多个从设备(通常是外围设备,如传感器或存储器),主设备负责发送和接收数据,而从设备只是响应主设备的命令,如果没有时钟则从设备则不会工作SPI的通信是同步的,这意味着
主设备生成时钟信号(称为SCK),并且从设备必须根据这个时钟来传输数据。从设备不能自己控制或者产生时钟,它们只能响应主设备提供的时钟信号
主设备还使用一个片选信号(通常称为SS或CS)来选择要与之通信的特定从设备。当主设备要与某个从设备通信时,它将该从设备的片选信号置为有效状态,以表明正在与该从设备进行通信,而其他从设备将处于非活动状态
- 采用同步方式(Synchronous)传输数据
主设备会根据将要交换的数据来产生相应的时钟脉冲(Clock Pulse), 时钟脉冲组成了时钟信号(Clock Signal) , 时钟信号通过时钟极性 (CPOL)和时钟相位 (CPHA)控制着两个 SPI 设备间何时数据交换以及何时对接收到的数据进行采样, 来保证数据在两个设备之间是同步传输的
- 数据交换(Data Exchanges)
SPI 设备间的数据传输之所以又被称为数据交换, 是因为 SPI 协议规定一个 SPI 设备不能在数据通信过程中仅仅只充当一个 "发送者(Transmitter)" 或者 "接收者(Receiver)"。 在每个 Clock 周期内, SPI 设备都会 发送并接收 一个 bit 大小的数据(不管主设备好还是从设备), 相当于该设备有一个 bit 大小的数据被交换了。一个 从设备 要想能够接收到 主设备 发过来的控制信号, 必须在此之前能够被 主设备 进行访问。所以, 主设备 必须首先通过 SS/CS pin 对 从设备 进行片选, 把想要访问的 从设备 选上. 在数据传输的过程中, 每次接收到的数据必须在下一次数据传输之前被采样. 如果之前接收到的数据没有被读取, 那么这些已经接收完成的数据将有可能会被丢弃, 导致 SPI 物理模块最终失效。 因此, 在程序中一般都会在 SPI 传输完数据后, 去读取 SPI 设备里的数据, 即使这些数据在我们的程序里是无用的(虽然发送后紧接着的读取是无意义的,但仍然需要从寄存器中读出来)
-
SPI有四种传输模式
-
SPI只有主模式和从模式之分
没有读和写的说法,因为实质上每次SPI是主从设备在交换数据。 也就是说,你发一个数据必然会收到一个数据;你要收一个数据必须也要先发一个数据
工作机制
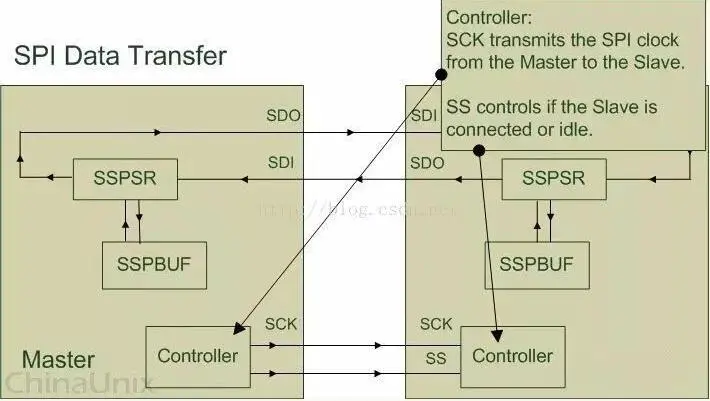
SPI 设备间通信的一个简单的描述:
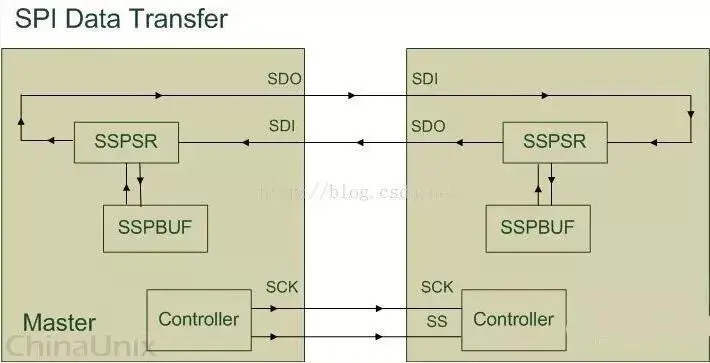
SPI 设备在进行通信的过程中, Master 设备和 Slave 设备之间会产生一个数据链路回环(Data Loop), 就像上图所画的那样, 通过 SDO 和 SDI 管脚, SSPSR 控制数据移入移出 SSPBUF, Controller 确定 SPI 总线的通信模式, SCK 传输时钟信号
| 组件 | 描述 |
|---|---|
SSPBUF |
泛指 SPI 设备里面的内部缓冲区, 一般在物理上是以 FIFO(先进先出) 的形式, 保存传输过程中的临时数据 |
SSPSR |
泛指 SPI 设备里面的移位寄存器, 它的作用是根据设置好的数据位宽把数据移入或者移出 SSPBUF |
Controller |
泛指 SPI 设备里面的控制寄存器, 可以通过配置它们来设置 SPI 总线的传输模式 |
通常情况下, 我们只需要对上图所描述的四个管脚(pin) 进行编程即可控制整个 SPI 设备之间的数据通信:
SDI/MISO:Master input slave output — 从->主,在 Master 上面也被称为 Rx-Channel,作为数据的入口, 主要用于SPI 设备接收数据
SDO/MOSI:Master output slave input— 主->从, 在 Master 上面也被称为 Tx-Channel,作为数据的出口, 主要用于 SPI 设备发送数据
SCK/SCLK : 串行时钟信号,由主机产生发送给从机, 控制数据交换的时机以及速率
SS/CS:片选信号,由主机发送,以控制与哪个从机通信(一般是低电平有效,具体看手册)
SSPSR
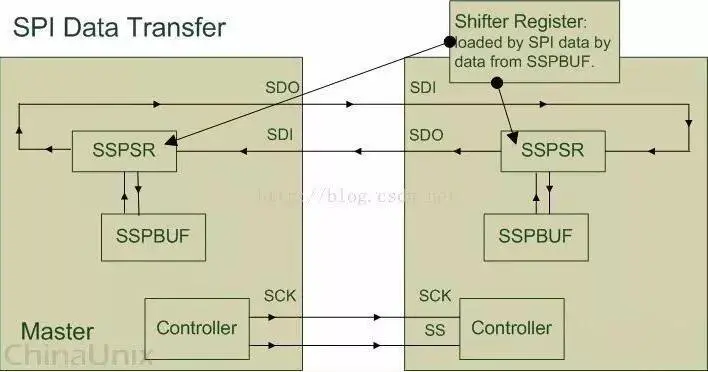
SSPSR 是 SPI 设备内部的移位寄存器(Shift Register). 它的主要作用是根据 SPI 时钟信号状态, 往 SSPBUF 里移入或者移出数据, 每次移动的数据大小由 Bus-Width 以及 Channel-Width 所决定
Bus-Width 的作用是指定地址总线到 Master 设备之间数据传输的单位
例如, 我们想要往 Master 设备里面的 SSPBUF 写入 16 Byte 大小的数据: 首先, 给 Master 设备的配置寄存器设置 Bus-Width 为 Byte; 然后往 Master 设备的 Tx-Data 移位寄存器在地址总线的入口写入数据, 每次写入 1 Byte 大小的数据(使用 writeb 函数); 写完 1 Byte 数据之后, Master 设备里面的 Tx-Data 移位寄存器会自动把从地址总线传来的 1 Byte 数据移入 SSPBUF 里; 上述动作一共需要重复执行 16 次
Channel-Width 的作用是指定 Master 设备与 Slave 设备之间数据传输的单位。与 Bus-Width 相似, Master 设备内部的移位寄存器会依据 Channel-Width 自动地把数据从 Master-SSPBUF 里通过 Master-SDO 管脚搬运到 Slave 设备里的 Slave-SDI 引脚, Slave-SSPSR 再把每次接收的数据移入 Slave-SSPBUF里。通常情况下, Bus-Width 总是会大于或等于 Channel-Width, 这样能保证不会出现因 Master 与 Slave 之间数据交换的频率比地址总线与 Master 之间的数据交换频率要快, 导致 SSPBUF 里面存放的数据为无效数据这样的情况
SSPBUF
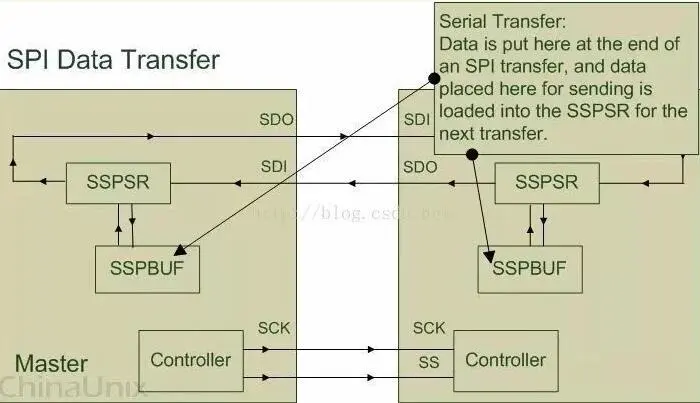
在每个时钟周期内, Master 与 Slave 之间交换的数据其实都是 SPI 内部移位寄存器从 SSPBUF 里面拷贝的. 我们可以通过往 SSPBUF 对应的寄存器 (Tx-Data / Rx-Data register) 里读写数据, 间接地操控 SPI 设备内部的 SSPBUF
例如, 在发送数据之前, 我们应该先往 Master 的 Tx-Data 寄存器写入将要发送出去的数据, 这些数据会被 Master-SSPSR 移位寄存器根据 Bus-Width 自动移入 Master-SSPBUF 里, 然后这些数据又会被 Master-SSPSR 根据 Channel-Width 从 Master-SSPBUF 中移出, 通过 Master-SDO 管脚传给 Slave-SDI 管脚, Slave-SSPSR 则把从 Slave-SDI 接收到的数据移入 Slave-SSPBUF 里.。与此同时, Slave-SSPBUF 里面的数据根据每次接收数据的大小(Channel-Width), 通过 Slave-SDO 发往 Master-SDI, Master-SSPSR 再把从 Master-SDI 接收的数据移入 Master-SSPBUF。在单次数据传输完成之后, 用户程序可以通过从 Master 设备的 Rx-Data 寄存器读取 Master 设备数据交换得到的数据
Controller
Master 设备里面的 Controller 主要通过时钟信号(Clock Signal)以及片选信号(Slave Select Signal)来控制 Slave 设备。 Slave 设备会一直等待, 直到接收到 Master 设备发过来的片选信号, 然后根据时钟信号来工作
Master 设备的片选操作必须由程序所实现。例如: 由程序把 SS/CS 管脚的时钟信号拉低电平, 完成 SPI 设备数据通信的前期工作; 当程序想让 SPI 设备结束数据通信时, 再把 SS/CS 管脚上的时钟信号拉高电平
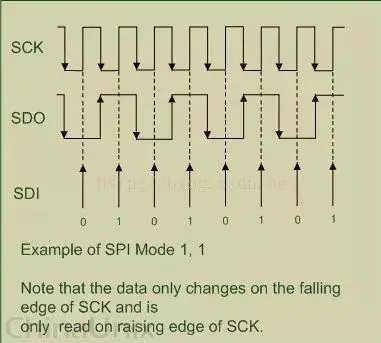
Timing
下图通过 Master 设备与 Slave 设备之间交换 1 Byte 数据来说明 SPI 协议的工作机制:
SPI相关的缩写或说法
CKPOL/CPOL/POL/Polariity:(时钟)极性
CKPHA/CPHA/PHA/Phase:(时钟)相位
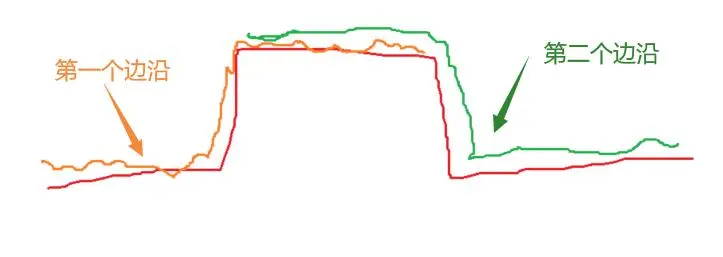
Edge:边沿,即时钟电平变化的时刻,即上升沿(rising edge) 或 下降沿(falling edge)
对于一个时钟周期内,有两个edge,分别称为:
Leading edge = 前一个边沿 = 第一个边沿,对于开始电压是1,那么就是1变成0的时候,对于开始电压是0,那么就是0变成1的时候Trailing edge = 后一个边沿 = 第二个边沿,对于开始电压是1,那么就是0变成1的时候(即在第一次1变成0之后,才可能有后面的0变成1),对于开始电压是0,那么就是1变成0的时候
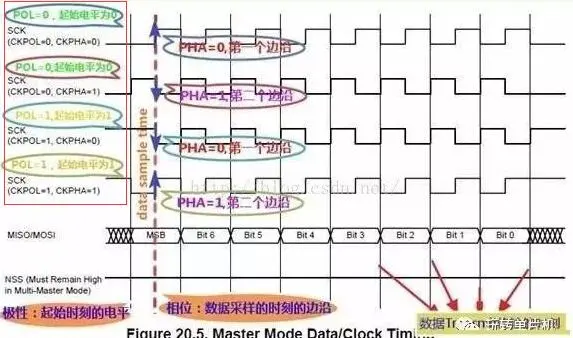
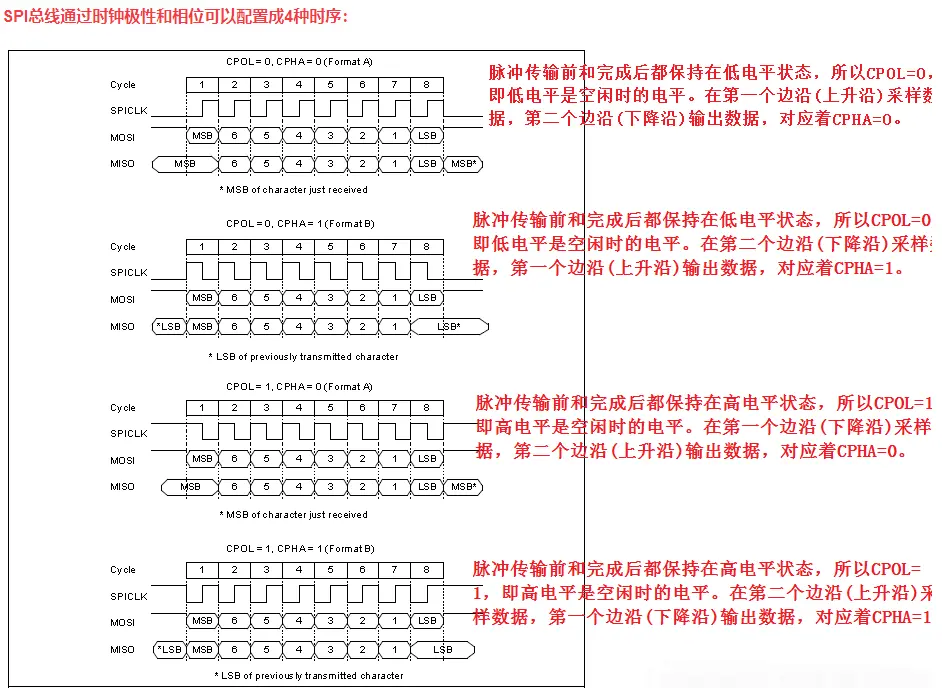
SPI的相位和极性
CPOL和CPHA,分别都可以是0或时1,对应的四种组合就是:
Mode 0CPOL=0, CPHA=0Mode 1CPOL=0, CPHA=1Mode 2CPOL=1, CPHA=0Mode 3CPOL=1, CPHA=1
CPOL极性
先说什么是SCLK时钟的空闲时刻,其就是当SCLK在发送8个bit比特数据之前和之后的状态,于此对应的,SCLK在发送数据的时候,就是正常的工作的时候,有效active的时刻了
SPI的CPOL,表示当SCLK空闲的时候,其电平的值是低电平0还是高电平1:
CPOL=0,时钟空闲时候的电平是低电平,所以当SCLK有效的时候,就是高电平,就是所谓的active-highCPOL=1,时钟空闲时候的电平是高电平,所以当SCLK有效的时候,就是低电平,就是所谓的active-low
CPHA 相位
相位,对应着数据采样是在第几个边沿(edge),是第一个边沿还是第二个边沿, 0 对应着第一个边沿, 1 对应着第二个边沿
CPHA=0,表示第一个边沿:
- 对于
CPOL=0,idle时候的是低电平,第一个边沿就是从低变到高,所以是上升沿 - 对于
CPOL=1,idle时候的是高电平,第一个边沿就是从高变到低,所以是下降沿
CPHA=1,表示第二个边沿:
- 对于
CPOL=0,idle时候的是低电平,第二个边沿就是从高变到低,所以是下降沿 - 对于
CPOL=1,idle时候的是高电平,第一个边沿就是从低变到高,所以是上升沿
软件中如何设置SPI的极性和相位
SPI分 主设备 和 从设备,两者通过SPI协议通讯
而设置SPI的模式,是 从设备 的模式,决定了 主设备 的模式
所以要先去搞懂 从设备 的SPI是何种模式,然后再将 主设备 的SPI的模式,设置和 从设备 相同的模式,即可正常通讯
对于 从设备 的SPI是什么模式,有两种:
- 固定的,由SPI从设备硬件决定的
SPI从设备,具体是什么模式,相关的datasheet中会有描述,需要自己去datasheet中找到相关的描述,即:
关于SPI从设备,在空闲的时候,是高电平还是低电平,即决定了 CPOL是0还是1
然后再找到关于设备是在上升沿还是下降沿去采样数据,这样就是, 在定了CPOL的值的前提下,对应着可以推算出CPHA是0还是1了
- 可配置的,由软件自己设定
从设备也是一个SPI控制器,4种模式都支持,此时只要自己设置为某种模式即可
然后知道了从设备的模式后,再去将SPI主设备的模式,设置为和从设备模式一样即可
对于如何配置SPI的CPOL和CPHA的话,不多细说,多数都是直接去写对应的SPI控制器中对应寄存器中的CPOL和CPHA那两位,写0或写1即可
注意
数据发送是先发高再发低
注意:一般来说模式0和模式3是匹配(都是上升沿采集下降沿数据变化),模式1和模式2是匹配的(都是下降沿采集上升沿数据变化),如果不匹配的话通讯就会出问题
注意:MOSI和MISO不能交叉连接
编程示例1
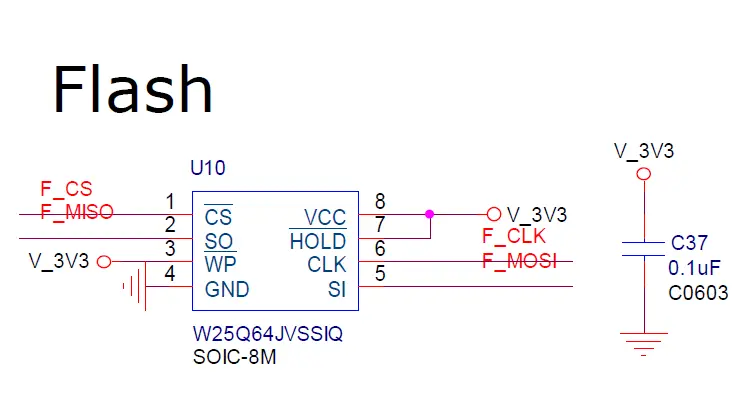
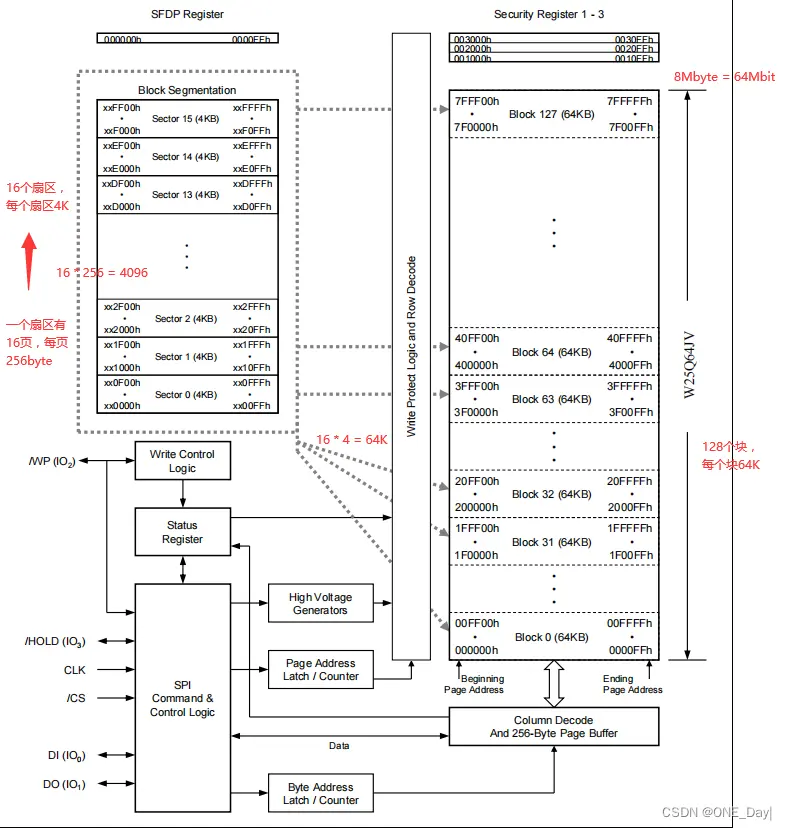
介绍:基于STM32F103ZET6,采用SPI,Flash型号采用 W25Q64JV
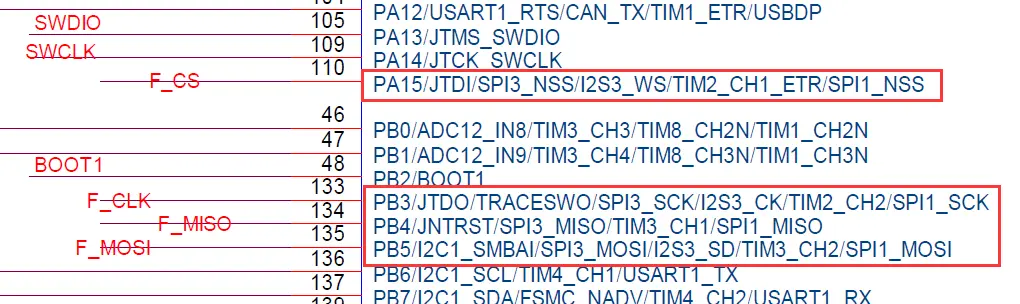
- 硬件连接
- 芯片手册阅读
基本信息:芯片的工作电压在2.7V到3.6V的电源上,电流消耗地至断电1uA,每个页面256字节,一次最多可编程256字节
只能1变0,不能0变1,所以需要擦除才能0变1
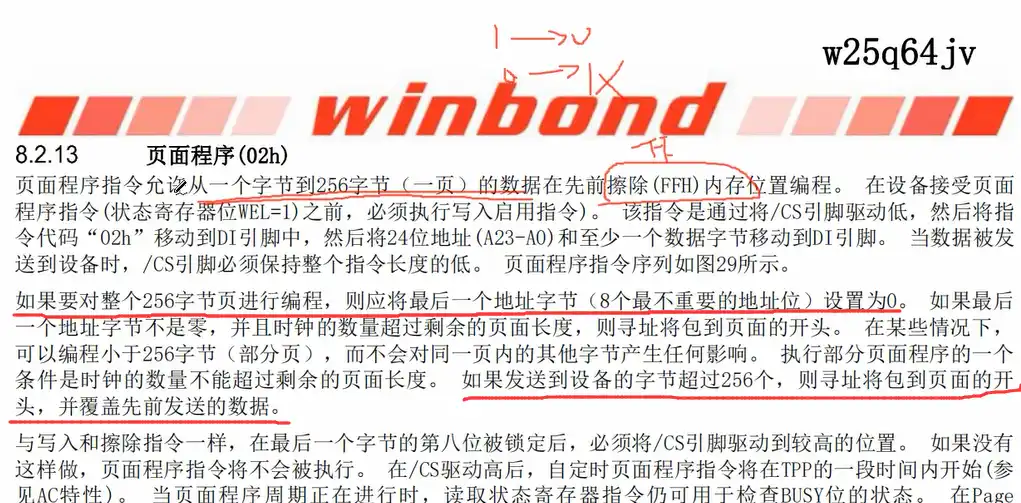
常用指令集:
指令 作用 0x06 写使能 0x04 写禁止 0x05 读状态寄存器1,可判断芯片是否准备接收下一条指令 0x03 读数据 0x02 页编程 0x20 扇区擦除 0xC7 芯片擦除 0x9F 读设备ID信息
这里需要注意,STM32自带有硬件SPI接口,但硬件的SPI接口CS引脚在传输完数据之后并不会自动拉高,一直是低电平,这不符合W25Q64JV芯片的时序要求,所以在初始化时,不使用硬件SPI的CS引脚,使用普通的GPIO口功能驱动W25Q64JV的CS引脚,通过编程拉低或者拉高CS引脚,达到芯片的时序要求,W25Q64JV的CS引脚是接到32单片机的SPI3_NSS引脚的,只是不使用这个NSS功能,用普通IO口
内部框图:
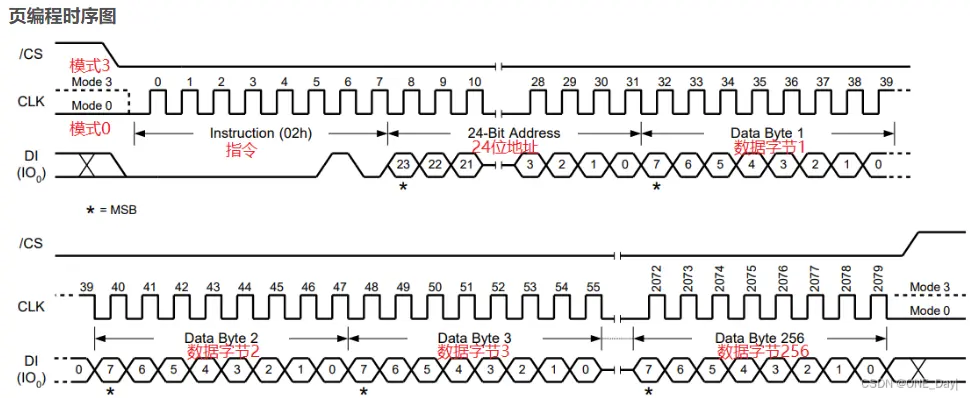
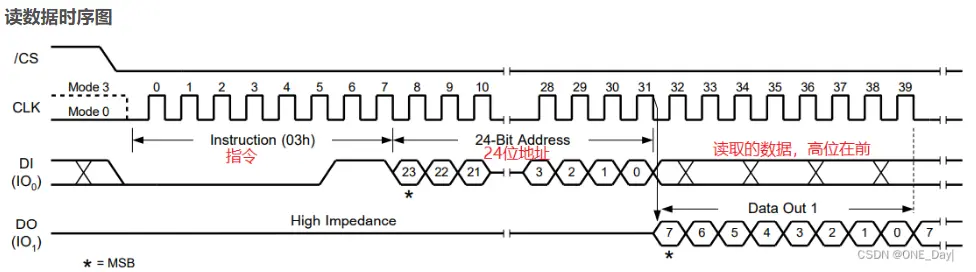
用到的时序:
这个可以判断是否写完,执行写操作时是1,写完执行完后变0

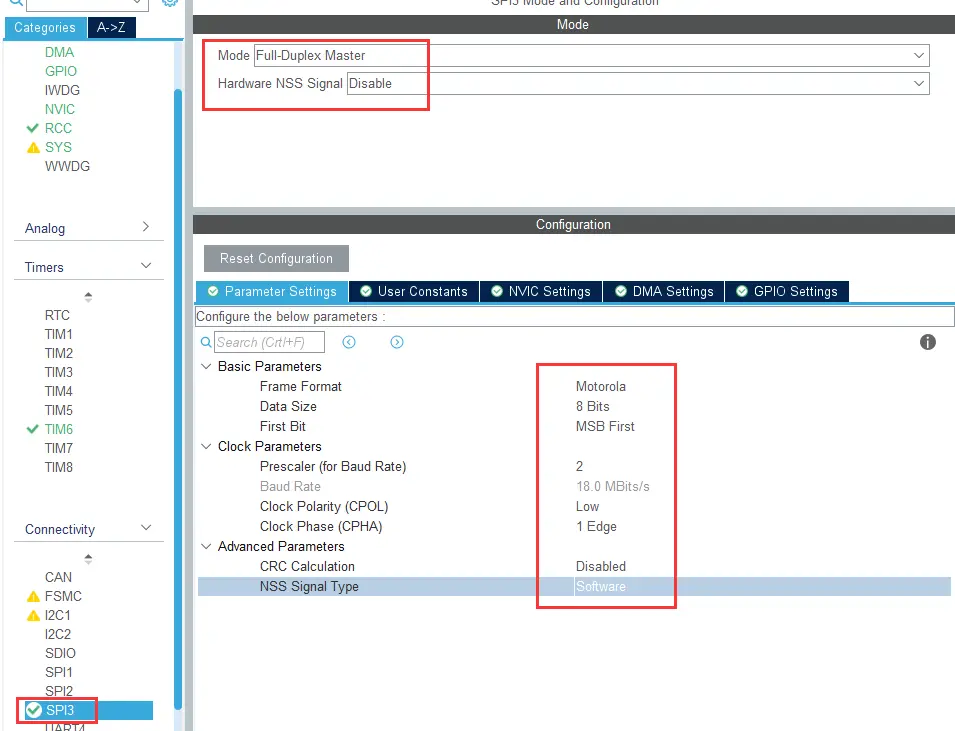
- MX配置
- 需要注意的是这里硬件NSS必须要禁止,因为一旦使能它只输出低电平,但是这个芯片它CS引脚需要有时间高电平,所以我们这里使用软件模拟CS,即PA15,默认是高电平的(总线空闲状态)
- 因为这个芯片支持最大100MHz,这个SPI3是挂载在APB1下是36MHz,所以需要分频,一般选择2分频即可

- 程序编写
Myinit.c
void vHardware_Init(void)
{
// 启动定时器6
Timer6.Timer6_Start_IT();
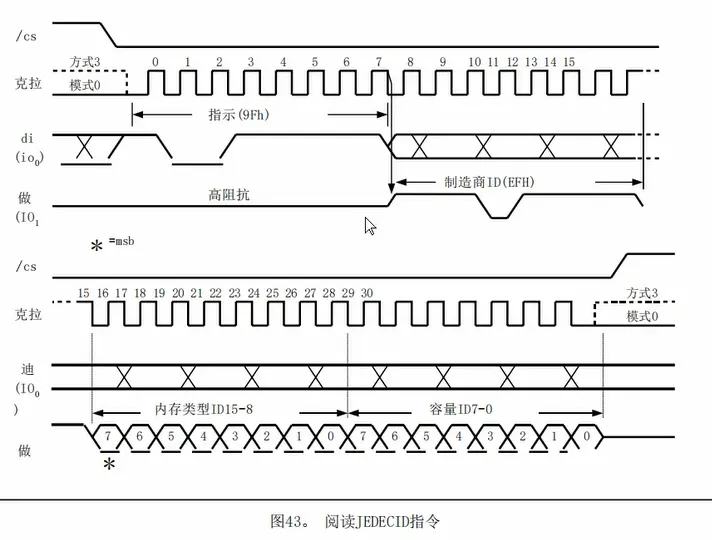
// 读取Flash芯片ID
SPI_Flash.ReadJedecID();
}SPI_Flash.h
#ifndef __SPI_FLASH_H
#define __SPI_FLASH_H
#include "AllHead.h"
//定义CS引脚
#define SET_SPI_Flash_CS HAL_GPIO_WritePin(GPIOA,GPIO_PIN_15,GPIO_PIN_SET)
#define CLR_SPI_Flash_CS HAL_GPIO_WritePin(GPIOA,GPIO_PIN_15,GPIO_PIN_RESET)
//指令宏定义
#define W25X_WriteEnable 0x06 //写使能
#define W25X_WriteDisable 0x04 //写禁止
#define W25X_ReadStatusRg1 0x05 //读状态寄存器1
#define W25X_ReadData 0x03 //读数据
#define W25X_PageProgram 0x02 //页编程
#define W25X_SectorErase 0x20 //扇区擦除
#define W25X_ChipErase 0xC7 //芯片擦除
#define W25X_ReadJedecID 0x9F //读设备ID
#define SPI_FLASH_PageSize 256 //页面最大字节长度
#define Flash_Status1_BUSY 1 //忙碌标志位
#define Dummy_Byte 0xFF //假数据
typedef struct
{
uint32_t jedecID; // 设备标志符->制造商+内存类型+容量
void (*ReadjedecID)(void); // 读取设备标志符
void (*EraseSector)(uint32_t); // 擦除扇区(4KB)
void (*EraseTotal)(void); // 擦除全部
void (*WritePage)(uint8_t*,uint32_t,uint16_t); // 写入页(256字节,写入长度不超过256字节)
void (*WriteUnfixed)(uint8_t*,uint32_t,uint32_t); // 写入不固定长度数据
void (*ReadUnfixed)(uint8_t*,uint32_t,uint32_t); // 读取不固定长度数据
}SPI_Flash_t;
extern SPI_Flash_t SPI_Flash;
#endif读取ID的时序:
SPI_Flash.c
#include "AllHead.h"
/*====================================静态内部变量/函数声明区 BEGIN====================================*/
static void SPI_Flash_ReadFlashID(void);
static void SPI_Flash_EraseSector(uint32_t);
static void SPI_Flash_EraseTotal(void);
static void SPI_Flash_WritePage(uint8_t*,uint32_t,uint16_t);
static void SPI_Flash_WriteUnfixed(uint8_t*,uint32_t,uint32_t);
static void SPI_Flash_ReadUnfixed(uint8_t*,uint32_t,uint32_t);
static uint8_t SPI_Flash_ReadByte(void); // 从Flash读一个字节
static void SPI_Flash_WriteByte(uint8_t); // 给Flash写一个字节
static void SPI_Flash_WriteEnable(void); // Flash使能
static void SPI_Flash_WaitForWriteEnd(void); // 等待Flash写入完成
/*====================================静态内部变量/函数声明区 END====================================*/
/*====================================变量区 BEGIN====================================*/
SPI_Flash_t SPI_Flash =
{
.0,
.SPI_Flash_ReadFlashID,
.SPI_Flash_EraseSector,
.SPI_Flash_EraseTotal,
.SPI_Flash_WritePage,
.SPI_Flash_WriteUnfixed,
.SPI_Flash_ReadUnfixed
};
/*====================================变量区 END====================================*/
/*
* @name SPI_Flash_ReadByte
* @brief 从Flash读取一个字节
* @param None
* @retval 返回读到的字节
*/
static uint8_t SPI_Flash_ReadByte()
{
uint8_t ReceiveByte;
//等待模式读取一个字节,并判断函数执行是否正确,正确则返回读取到的字节,错误则返回错误数据
if(HAL_SPI_Receive(&hspi3,&ReceiveByte,1,0x0A) != HAL_OK)
{
ReceiveByte = Dummy_Byte; //错误数据
}
return ReceiveByte;
}
/*
* @name SPI_Flash_WriteByte
* @brief Flash写入一个字节
* @param None
* @retval None
*/
static void SPI_Flash_WriteByte(uint8_t Byte)
{
uint8_t SendByte = Byte;
//等待模式写入一个字节
HAL_SPI_Transmit(&hspi3,&SendByte,1,0x0A);
}
/*
* @name SPI_Flash_WriteEnable
* @brief Flash写使能
* @param None
* @retval None
*/
static void SPI_Flash_WriteEnable()
{
//选择Flash芯片:CS引脚输出低电平
CLR_SPI_Flash_CS;
//发送命令:写使能0x06
SPI_Flash_WriteByte(W25X_WriteEnable);
//禁用Flash芯片:CS引脚输出高电平
SET_SPI_Flash_CS;
}
/*
* @name SPI_Flash_WaitForWriteEnd
* @brief 等待SPI写入完成
* @param None
* @retval None
*/
static void SPI_Flash_WaitForWriteEnd()
{
uint8_t Flash_Status = 0;
//选择Flash芯片:CS引脚输出低电平
CLR_SPI_Flash_CS;
//写入命令:读取状态寄存器1
SPI_Flash_WriteByte(W25X_ReadStatusRg1);
//等待数据写入完成,不断读取BUSY位状态,如果为1,则继续读,如果为0,则退出
Timer6.usDelay_Timer = 0;
do
{
Flash_Status = SPI_Flash_ReadByte();
// 超时机制
if(Timer6.usDelay_Timer >= TIMER_10s)
{
break;
}
} while((Flash_Status&Flash_Status1_BUSY) == Flash_Status1_BUSY);
//禁用Flash芯片:CS引脚输出高电平
SET_SPI_Flash_CS;
}
static void SPI_Flash_ReadFlashID(void)
{
uint8_t buf[3];
// 选择Flash芯片:CS输出低电平
CLR_SPI_Flash_CS;
// 发送命令
SPI_Flash_WriteByte(W25X_ReadjedecID);
buf[0] = SPI_Flash_ReadByte();
buf[1] = SPI_Flash_ReadByte();
buf[2] = SPI_Flash_ReadByte();
// 禁用Flash:CS输出高电平
SET_SPI_Flash_CS;
SPI_Flash.JedecID = (buf[0]<< 16) + (buf[1] << 8) + buf[2];
printf("ID:0x%.6X\r\n",SPI_Flash.JedecID);
}
/*
* @name SPI_Flash_EraseSector
* @brief 扇区擦除
* @param SectorAddr:待擦除的地址,要求为4K的倍数
* @retval None
*/
static void SPI_Flash_EraseSector(uint32_t SectorAddr)
{
//检测Flash是否处于忙碌状态
SPI_Flash_WaitForWriteEnd();
//Flash写使能,允许擦除
SPI_Flash_WriteEnable();
//选择Flash芯片:CS引脚输出低电平
CLR_SPI_Flash_CS;
//发送扇区擦除指令
SPI_Flash_WriteByte(W25X_SectorErase);
//发送擦除扇区地址的高字节
SPI_Flash_WriteByte((SectorAddr & 0xFF0000) >> 16);
//发送擦除扇区地址的中字节
SPI_Flash_WriteByte((SectorAddr & 0x00FF00) >> 8);
//发送擦除扇区地址的低字节
SPI_Flash_WriteByte((SectorAddr & 0x0000FF));
//禁用Flash芯片:CS引脚输出高电平
SET_SPI_Flash_CS;
//等待擦除完毕
SPI_Flash_WaitForWriteEnd();
printf("扇区擦除成功!\r\n");
}
// 擦除全部
static void SPI_Flash_EraseTotal(void)
{
// Flash使能
SPI_Flash_WriteEnable();
// 擦整片
CLR_SPI_Flash_CS;
SPI_Flash_WriteByte(W25X_ChipErase);
SET_SPI_Flash_CS;
SPI_Flash_WaitForWriteEnd();
}
/*
* @name SPI_Flash_ReadUnfixed
* @brief 读取不固定长度数据
* @param pWriteBuffer:存放读取数据的缓存指针
WriteAddr:待读取的地址
WriteLength:读取数据的长度
* @retval None
*/
static void SPI_Flash_ReadUnfixed(uint8_t* pReadBuffer,uint32_t ReadAddr,uint32_t ReadLength)
{
//检测Flash是否处于忙碌状态
SPI_Flash_WaitForWriteEnd();
//选择Flash芯片:CS引脚输出低电平
CLR_SPI_Flash_CS;
//发送命令,读取数据
SPI_Flash_WriteByte(W25X_ReadData);
//发送24位地址
SPI_Flash_WriteByte((ReadAddr & 0xFF0000) >> 16);
SPI_Flash_WriteByte((ReadAddr & 0x00FF00) >> 8);
SPI_Flash_WriteByte((ReadAddr & 0x0000FF));
//开始读取数据
while(ReadLength--)
{
//读取一个字节
*pReadBuffer = SPI_Flash_ReadByte();
//指向下一个字节缓冲区
pReadBuffer++;
}
//禁用Flash芯片:CS引脚输出高电平
SET_SPI_Flash_CS;
}
// 页写入--有风险
static void SPI_Flash_WritePage(uint8_t* pWriteBuffer,uint32_t WriteAddr,uint16_t WriteLength)
{
SPI_Flash_WriteEnable();
CLR_SPI_Flash_CS;
SPI_Flash_WriteByte(W25X_PageProgram);
// 发送地址高字节
SPI_Flash_WriteByte((WriteAddr & 0xFF0000) >> 16);
// 发送地址中字节
SPI_Flash_WriteByte((WriteAddr & 0x00FF00) >> 8);
// 发送地址低字节
SPI_Flash_WriteByte(WriteAddr & 0xFF);
if(WriteLength > SPI_Flash_PageSize)
{
WriteLength = SPI_Flash_PageSize;
printf("Error\r\n");
}
// 开始写入数据
while(WriteLength--)
{
// 读取一个字节
SPI_Flash_WriteByte(*pWriteBuffer);
// 指向下一个字节缓冲区
pWriteBuffer++;
}
SET_SPI_Flash_CS;
SPI_Flash_WaitForWriteEnd();
}
// 写入不固定长度数据
static void SPI_Flash_WriteUnfixed(uint8_t *pWriteBuffer, uint32_t WriteAddr, uint32_t WriteLength)
{
uint32_t PageNumofWriteLength = WriteLength / SPI_FLASH_PageSize; // 待写入页数
uint8_t NotEnoughNumofPage = WriteLength % SPI_FLASH_PageSize; // 不足一页的数量
uint8_t WriteAddrPageAlignment = WriteAddr % SPI_FLASH_PageSize; // 如果取余为0,则地址页对齐,可以写
uint8_t NotAlignmentNumofPage = SPI_FLASH_PageSize - WriteAddrPageAlignment; // 地址不对齐部分,最多可以写入的字节数量
// 写入地址页对齐
if (0 == WriteAddrPageAlignment)
{
// 待待写入数据不足一页
if (0 == PageNumofWriteLength)
{
SPI_Flash_WritePage(pWriteBuffer, WriteAddr, WriteLength);
}
// 代写入数据超过一页
else
{
// 先写入整页
while (PageNumofWriteLength--)
{
SPI_Flash_WritePage(pWriteBuffer, WriteAddr, SPI_FLASH_PageSize);
pWriteBuffer += SPI_FLASH_PageSize;
WriteAddr += SPI_FLASH_PageSize;
}
// 再写入不足一页的数据
if (NotEnoughNumofPage > 0)
{
SPI_Flash_WritePage(pWriteBuffer, WriteAddr, NotEnoughNumofPage);
}
}
}
// 写入地址与页不对齐
else
{
// 待写入数据不足一页
if (0 == PageNumofWriteLength)
{
// 不足一页的数据<=地址不对齐部分
if (NotEnoughNumofPage <= NotAlignmentNumofPage)
{
SPI_Flash_WritePage(pWriteBuffer, WriteAddr, WriteLength);
}
// 不足一页的数据 > 地址不对齐部分
else
{
// 先写地址不对齐部分允许写入的最大长度
SPI_Flash_WritePage(pWriteBuffer, WriteAddr, NotAlignmentNumofPage);
pWriteBuffer += NotAlignmentNumofPage;
WriteAddr += NotAlignmentNumofPage;
// 再写没写完的数据
SPI_Flash_WritePage(pWriteBuffer, WriteAddr, NotEnoughNumofPage - NotAlignmentNumofPage);
}
}
// 待写数据超过一页
else
{
// 先写地址不对齐部分允许写入的最大长度,此时地址对齐了
SPI_Flash_WritePage(pWriteBuffer, WriteAddr, NotAlignmentNumofPage);
pWriteBuffer += NotAlignmentNumofPage;
WriteAddr += NotAlignmentNumofPage;
// 地址对齐后,重新计算写入页数与不足一页的数量
WriteLength -= NotAlignmentNumofPage;
PageNumofWriteLength = WriteLength / SPI_FLASH_PageSize;
NotEnoughNumofPage = WriteLength % SPI_FLASH_PageSize;
// 先写入整页
while (PageNumofWriteLength--)
{
SPI_Flash_WritePage(pWriteBuffer, WriteAddr, SPI_FLASH_PageSize);
pWriteBuffer += SPI_FLASH_PageSize;
WriteAddr += SPI_FLASH_PageSize;
}
// 再写入不足一页的数据
if (NotEnoughNumofPage > 0)
{
SPI_Flash_WritePage(pWriteBuffer, WriteAddr, NotEnoughNumofPage);
}
}
}
}main.c
uint8_t Tx_Buffer[] = "嵌入式-培养人才,加油!Yang";
const uint8_t BufferSize = sizeof(Tx_Buffer)/sizeof(Tx_Buffer[0]);
uint8_t Rx_Buffer[BufferSize];
//芯片测试
//擦除扇区
SPI_Flash.EraseSector(0x00000000);
// 写入不定长数据
SPI_Flash.WriteUnfixed(Tx_Buffer,0x00000088,BufferSize);
// 读出不定长数据
SPI_Flash.ReadUnfixed(Rx_Buffer,0x00000088,BufferSize);
printf("读出的数据为:%s\r\n",Rx_Buffer);编程示例2
模拟SPI
- 接线
单片机GND ---- 屏幕GND
单片机3.3V ---- 屏幕VCC
单片机PB11 ---- 屏幕CS【片选CS】
单片机PB10 ---- 屏幕AO【寄存器/数据选择】
单片机PB12 ---- 屏幕RESET【复位】
单片机PA8 ---- 屏幕LED【背光】
单片机PB13 ---- 屏幕SCK【总线时钟】
单片机PC3 ---- 屏幕SDA【总线写数据信号MOSI】
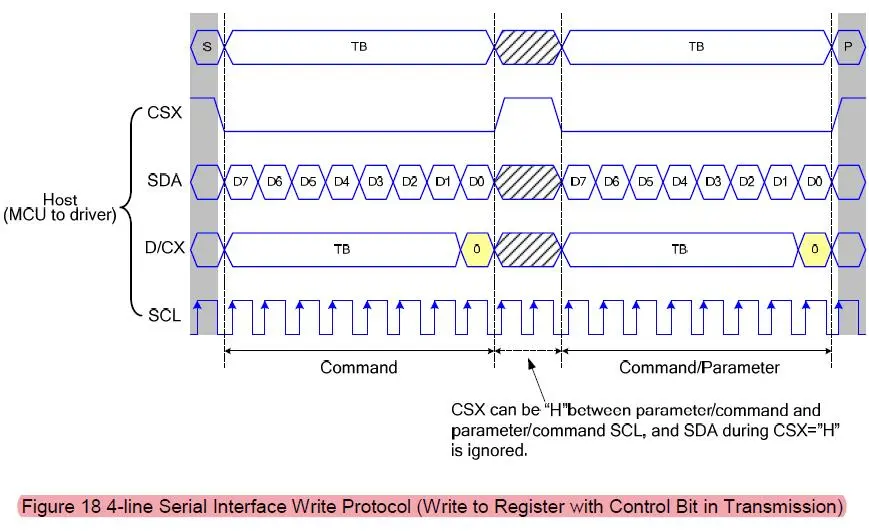
介绍:基于STM32F407VET6,软件模拟SPI驱动 ST7735S LCD屏幕
时序
可以看到SCL在低电平时数据是可以改变的,也就是SCL低电平空闲,极性就是 CPOL=0,SDA数据是在SCL第一个沿稳定,第二沿时才可以被改变,所以相当于第一个沿采样数据,也就是相位是 CPAL=0,也就是SPI模式 0
模拟SPI的引脚操作
// 置1操作(bit set/reset register)
#define LCD_SCL_SET HAL_GPIO_WritePin(LCD_SCK_GPIO_Port,LCD_SCK_Pin,GPIO_PIN_SET)
#define LCD_SDA_SET HAL_GPIO_WritePin(LCD_SDA_GPIO_Port,LCD_SDA_Pin,GPIO_PIN_SET)
#define LCD_CS_SET HAL_GPIO_WritePin(LCD_CS_GPIO_Port,LCD_CS_Pin,GPIO_PIN_SET)
#define LCD_DC_SET HAL_GPIO_WritePin(LCD_AO_GPIO_Port,LCD_AO_Pin,GPIO_PIN_SET)
#define LCD_RES_SET HAL_GPIO_WritePin(LCD_RESET_GPIO_Port,LCD_RESET_Pin,GPIO_PIN_SET)
// 置0操作(bit reset register)
#define LCD_SCL_CLR HAL_GPIO_WritePin(LCD_SCK_GPIO_Port,LCD_SCK_Pin,GPIO_PIN_RESET)
#define LCD_SDA_CLR HAL_GPIO_WritePin(LCD_SDA_GPIO_Port,LCD_SDA_Pin,GPIO_PIN_RESET)
#define LCD_CS_CLR HAL_GPIO_WritePin(LCD_CS_GPIO_Port,LCD_CS_Pin,GPIO_PIN_RESET)
#define LCD_DC_CLR HAL_GPIO_WritePin(LCD_AO_GPIO_Port,LCD_AO_Pin,GPIO_PIN_RESET)
#define LCD_RES_CLR HAL_GPIO_WritePin(LCD_RESET_GPIO_Port,LCD_RESET_Pin,GPIO_PIN_RESET)向SPI总线发送一个字节数据
static void SPI_ST7735_Write_Data(uint8_t Data)
{
uint8_t i;
for(i = 0; i < 8; i++)
{
if (Data & 0x80)
{
LCD_SDA_SET; // 输出数据
}
else
{
LCD_SDA_CLR;
}
LCD_SCL_CLR;
LCD_SCL_SET; // 表示SCL时钟信号处于上升沿,开始一位数据传送
Data <<= 1;
}
}发送数据/命令函数
/*
* @function: ST7735_Write_CMD
* @param: CMD -> 待写入命令
* @retval: None
* @brief: 向液晶屏写一个字节命令
*/
static void ST7735_Write_CMD(uint8_t CMD)
{
// CS拉低通信开始,CS拉高通信结束
LCD_CS_CLR;
LCD_DC_CLR;
SPI_ST7735_Write_Data(CMD);
LCD_CS_SET;
}
/*
* @function: ST7735_Write_DATA_8BIT
* @param: DATA -> 待写入数据
* @retval: None
* @brief: 向液晶屏写1个字节数据
*/
static void ST7735_Write_DATA_8BIT(uint8_t DATA)
{
LCD_CS_CLR;
LCD_DC_SET;
SPI_ST7735_Write_Data(DATA);
LCD_CS_SET;
}
/*
* @function: ST7735_Write_DATA_16BIT
* @param: DATA -> 待写入数据
* @retval: None
* @brief: 向液晶屏写2个字节数据
*/
static void ST7735_Write_DATA_16BIT(uint16_t DATA)
{
LCD_CS_CLR;
LCD_DC_SET;
SPI_ST7735_Write_Data(DATA >> 8); // 先高再低
SPI_ST7735_Write_Data(DATA);
LCD_CS_SET;
}硬件SPI
基于上面,只是把SCL和SDA引脚用硬件SPI代替,修改一下发送单字节数据函数即可
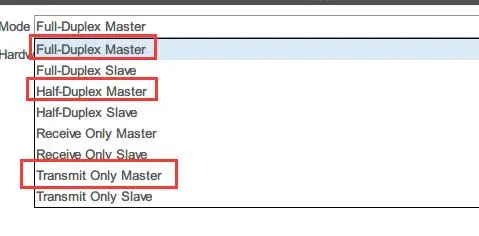
- MX配置
这里Mode选择这几个都可以
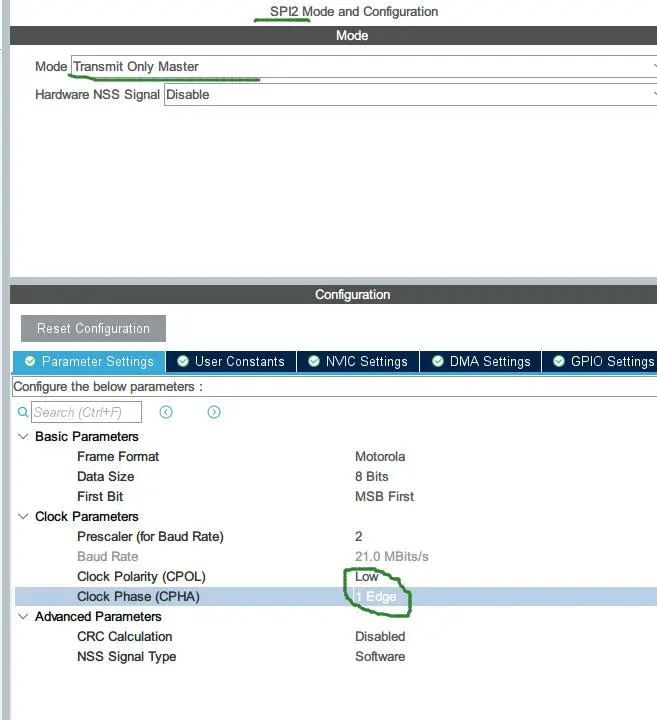
- 程序
/*
* @function: SPI_ST7735_Write_Data
* @param: Data -> 一个字节数据
* @retval: None
* @brief: 向SPI总线传输一个字节数据
*/
static void SPI_ST7735_Write_Data(uint8_t Data)
{
HAL_SPI_Transmit(&hspi2,&Data,sizeof(Data),HAL_MAX_DELAY);
}如果加DMA的话,直接MX打开即可,配置默认,需要打开DMA中断和SPI中断(程序里不需要处理),然后把发送函数改成:
HAL_SPI_Transmit_DMA(&hspi2,&Data,sizeof(Data));